Capitolo 3.9
Sicurezza dei robot: dalle “gabbie” ai “cobot”
Di seguito abbiamo riassunto le informazioni più importanti sui concetti di sicurezza per le vostre applicazioni robotiche. Scoprite come impedire l'accesso ai pericoli, limitare il movimento del robot e garantire un'interazione uomo-robot sicura. Scoprite l'importanza delle recinzioni di sicurezza, dei sistemi di rilevamento avanzati e della pianificazione di spazi di lavoro collaborativi.
Norme e regole essenziali per la sicurezza dei robot
I robot sono incredibilmente versatili e offrono soluzioni di automazione economiche. Tuttavia, possono anche essere molto pericolosi.
I robot di grandi dimensioni e che lavorano ad alta velocità possono causare lesioni molto gravi soprattutto per schiacciamento e impatto. Pertanto, la sicurezza dei robot è stata standardizzata a livello internazionale (EN) ISO 10218-1 e -2 e, per gli Stati Uniti, nella quasi identica ANSI/RIA R15.06. Inoltre, è stato pubblicato uno standard per i robot mobili con la norma ANSI/RIA R15.08.
La sicurezza dei robot si basa su tre elementi:
- Impedire l'accesso alle persone
- Limitare il movimento del robot
- Rendere sicuro il contatto fisico
Il terzo elemento, la sicurezza del contatto fisico, è un concetto relativamente nuovo, spesso indicato come funzionamento collaborativo dei robot. Significa che un sistema robotico appositamente progettato e un operatore lavorano nello stesso spazio di lavoro o in spazi di lavoro sovrapposti. In primo luogo, è necessario pianificare lo spazio di lavoro collaborativo e l'interazione desiderata tra uomo e robot. Quindi, si identificano i rischi e si implementano le misure di sicurezza appropriate.

Cos'è un “robot collaborativo”?
La misura di sicurezza più avanzata è l'uso di un robot collaborativo, talvolta definito “cobot”.
Per chiarezza facciamo un esempio:
- Immaginate di stare seduti accanto a un robot che maneggia una siringa con un liquido velenoso. La velocità e la forza dei suoi movimenti diventano improvvisamente preoccupazioni secondarie.
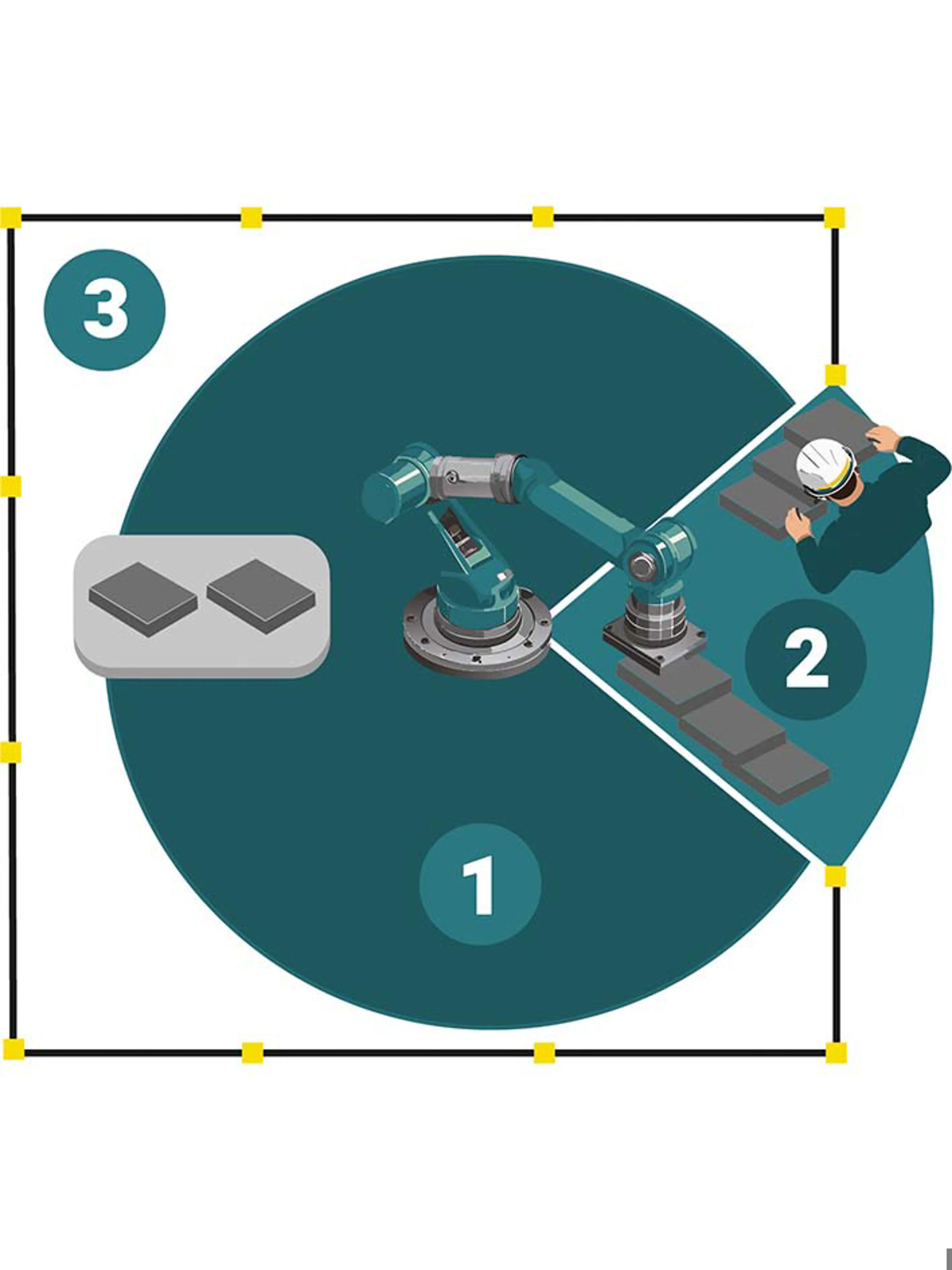
La sicurezza negli spazi di lavoro collaborativi
Nella grafica, un operatore umano e un robot condividono lo spazio di lavoro collaborativo.
Misure di sicurezza:
- Un robot pericoloso non deve muoversi all'interno dell'area collaborativa se è presente una persona.
- A seconda della distanza e della velocità di movimento della persona, il robot potrebbe dover rallentare e fermarsi quando la persona si avvicina.
Recinzione di sicurezza:
- Le recinzioni di sicurezza sono ancora necessarie in alcune applicazioni collaborative, e lo saranno anche in futuro.
- Le recinzioni assumono nuovi ruoli, come ad esempio delimitare un'area di collaborazione dagli spazi di lavoro e dai passaggi ordinari
Sicurezza dei robot industriali
La sicurezza dei robot dipende in larga parte da "celle" chiuse con recinzioni e porte di accesso. Ma in molte applicazioni sono necessari anche sistemi di monitoraggio o potrebbero persino sostituire la "gabbia" del robot.
Sistemi di rilevamento avanzati
- La forma più avanzata di sistema di rilevamento è una telecamera 3D. Deve essere installata a un'altezza sufficiente sopra l'area di lavoro per garantire che "veda" tutte le aree in cui le persone potrebbero muoversi.
- In molte celle robotizzate viene utilizzata una combinazione di recinzioni di sicurezza con porte, barriere fotoelettriche e scanner di portata.
Attenzione a che le persone rimangano all'interno della zona di pericolo dietro i dispositivi di rilevamento. Se ciò è possibile, potrebbero essere necessarie ulteriori misure di sicurezza.

Spazi sicuri per i robot
La recinzione può essere utilizzata per creare uno “spazio protetto”, ma normalmente non deve essere utilizzata per definire lo “spazio limitato”.
I robot che si scontrano con le recinzioni ad alta velocità o con forza significativa possono causare deformazioni, anche in recinzioni robuste, con potenziali rischi per la sicurezza. Inoltre, le recinzioni possono permettere alle persone di infilare le dita attraverso le aperture, aumentando il rischio di lesioni. Per ridurre questi problemi, è necessario mantenere una distanza minima di 120-200 mm tra lo spazio limitato e il bordo esterno della recinzione. Per ulteriori informazioni sul calcolo e la determinazione dell'altezza e della distanza corretta delle recinzioni di protezione, consultare il capitolo 3.2 “Selezionare e scegliere le protezioni”
Pertanto, non è sufficiente affidarsi esclusivamente alle cosiddette recinzioni “a prova di robot”. Occorre invece implementare dispositivi di limitazione appropriati per garantire la sicurezza, quali:
- Software di controllo del movimento classificato per la sicurezza (conforme almeno a PL = d secondo (EN) ISO 13849-1 o SIL 2 secondo (EN) IEC 62061)
- Meccanismi di limitazione dello spazio o arresti fisici (ad esempio, blocchi e perni di arresto)
- Dispositivi di limitazione esterni (ad esempio, arresti meccanici o interruttori di prossimità)
La recinzione è sempre pensata per tenere le persone al di fuori della zona di pericolo, non per confinare il robot.

Recinzioni "sicure per i robot" – concetto o malinteso?
Molte persone chiedono recinzioni “sicure per i robot” o puntano ai risultati dei test dei produttori di recinzioni che mostrano una resistenza agli urti di 2.000 joule o più.
La domanda stessa rivela un'idea sbagliata sulla sicurezza dei robot. Gli standard di sicurezza dei robot richiedono che il loro movimento sia limitato con mezzi diversi dalle recinzioni o da altre protezioni.
Il raggio di movimento di un robot dipende molto dalle sue dimensioni. Spesso questo "spazio massimo" è molto più grande del necessario per l'operazione in questione. Poiché i progettisti di sistemi desiderano utilizzare il minor spazio possibile, il robot è programmato per mantenere uno "spazio limitato" molto più piccolo.
Quindi vengono utilizzati recinzioni o scanner di distanza per definire quello che sarà lo "spazio protetto" attorno a quello che sarà lo spazio limitato in cui le persone non devono accedere.
Comunque, una distanza di sicurezza è praticamente sempre necessaria tra lo spazio limitato e lo spazio protetto, e questo perché il robot ha bisogno di tempo per rallentare e fermarsi quando viene rilevata una persona che entra nello spazio protetto (da una barriera fotoelettrica, uno scanner, una telecamera o un interruttore della porta).